
IP-домофон "Ермак"
Karnix ASB-254

RanetkaPC_SBC

RanetkaPC
TMSController
SP-SMPSU-V3.0
LEDControl

Module A20

Hi-End DAC
TL-1 HeadCrab
FRAME-R2-60x60

PCB-STAND-M3

Экран М1

LCU-1

Media Tower II

SmartPWR6
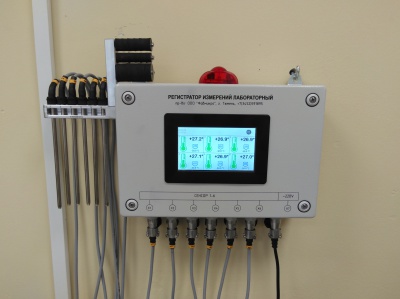
Термограф
ПДТ TS1
РИЛ-1

РАДУГА А1

JEDEC Loose Feeder
ПЛК Grovex C1
Grovex D-series
UNICAT A2
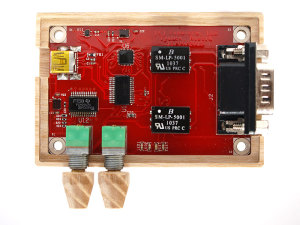
IMU A1
Grovex A2
ValveDriver A4

APS A2

RiverRide B4
Инерциальный датчик углового положения в 3D пространстве
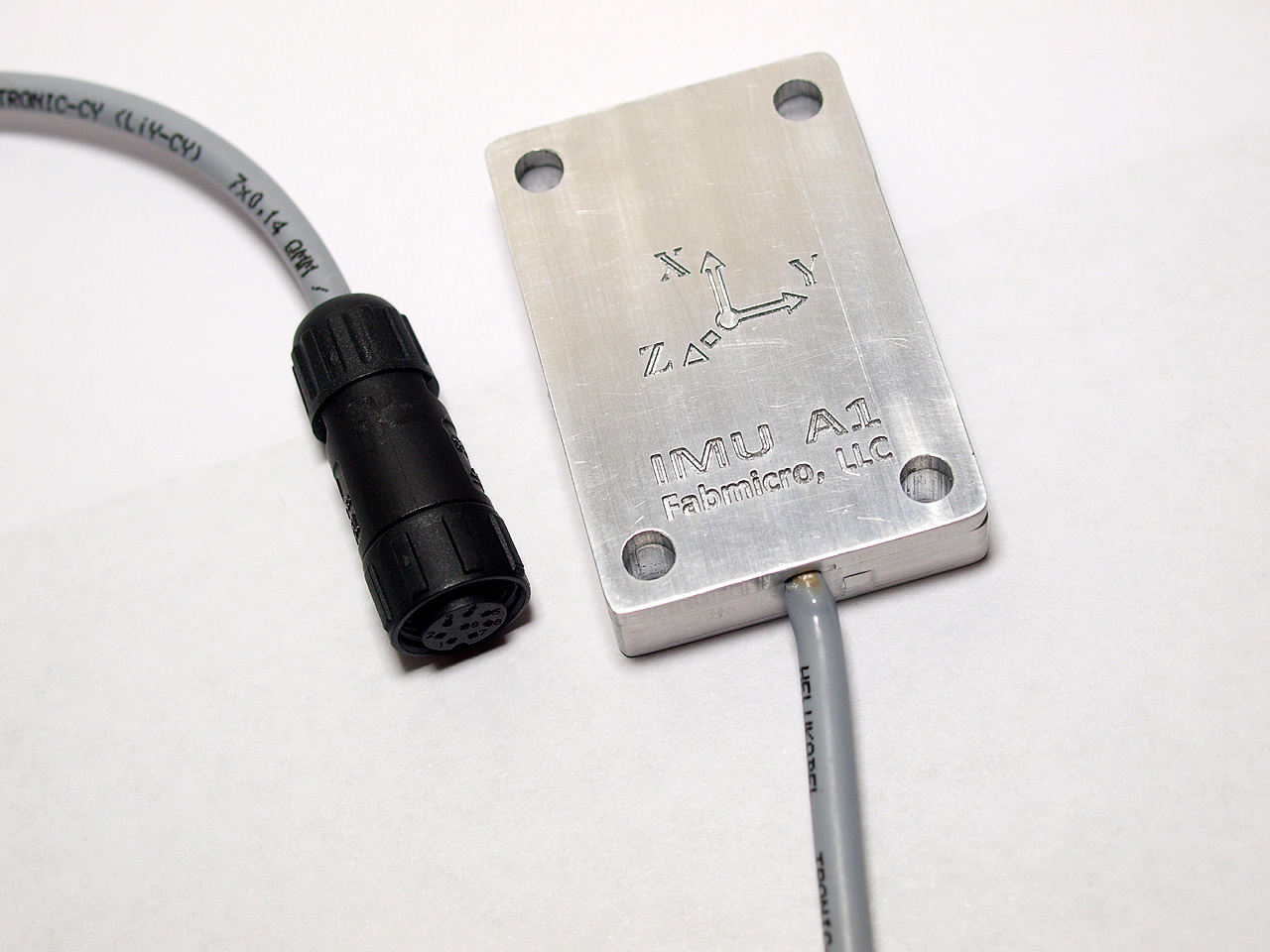

Представляет собой устройство в котором интегрирован массив инерциальных измерительных приборов MEMS типа. В устройстве реализована идея "sensor fusion" - используя один из двух методов объединения данных (Калман или скользящее среднее) по каждому из массивов гомогенных приборов производится вычисление уточненного значение параметров в трехмерном пространстве, в результате образуя три виртуальных измерительных прибора: виртуальный гироскоп, виртуальный акселерометр и виртуальный магнитометр. Характетистики каждого виртуального прибора существенно улучшены по отношению к характеристикам отдельных физических приборов в массиве. Данные полученные от виртуальных приборов проходят через алгоритм Madgwick AHRS, в котором находится решение кватерниона вращения в трехмерном пространстве. Решение в виде четырех параметров кватерниона {Q0, Q1, Q2, Q3} выдается на выходе устройства через последовательный интерфейс в виде строки формата NMEA. В устройстве имеется возможность гибкой настройки алгоритмов, в том числе задания весовых коэфициентов для каждого из приборов в гомогенном массиве, что позволяет либо исключить сбойный прибор из расчета, либо уменьшить его влияние на конечное решение. Имеется возможность на "ходу" включать или отключать корректировку решения по виртуальному акселерометру, по виртуальному магнитометру или по обоим приборам сразу.
Алгоритмы расчета устроены таким образом, что при сбое одного или нескольких физических пробиров в массиве их показания исключаются из расчета, тем самым увеличивается погрешность конечного решения, но не прекращается его выдача, до тех пор, пока в каждом из виртуальных приборов есть хотя бы один рабочий физический прибор.
Массивы инерциальных приборов:
- два MEMS гироскопа MAX21000
- два MEMS гироскопа L3G4200D
- два MEMS акселерометра LIS3DSH
- два MEMS магнитометра MAG3110
Интерфейс:
- Последовательный RS-232 и RS-422, с развязкой через газоразрядники перенапряжения (GDT).
- Скорость выдачи строки: 115200 бод.
- Формат выдаваемой строки: NMEA.
- Максимальная частота выдачи решения для кватерниона вращения: 80 Гц
- Максимальная частота выдачи необработанных данных с массива гироскопов: 400 Гц.
- Максимальная частота выдачи необработанных данных с массива акселерометров: 200 Гц.
- Максимальная частота выдачи необработанных данных с массива магнитометров: 80 Гц.
Калибровка:
В устройстве имеется возмоность произвести калибровку всего массива инерциальных приборов по следующим параметрам:
1. Термостабильная калибровка в диапазоне температур -40C +80C задается массивом с шагом 1 градус.
2. Калибровка гироскопов на прецессию, смещение и размерность шкалы.
3. Калибровка акселерометров на смещение и размерность шкалы.
4. Калибровка магнитометров на смещение и элептичность.
Имеется возможность задание углов отклонения (declination) и наклонения (inclination) в местности эксплуатации устройства.
Область применения:
1. Навигация - БИНС в составе мини-БПЛА, гирокомпас, авторулевой в системе навигации речных судов и иных подвижных средств малого радиуса действия.
2. Гиростабилизированые платформы и робототехника.
3. Защищенный алюминиевый корпус, а также развязка интерфейса через газоразрядники перенапряжения (GDT) позволяет использовать устройство IMU A1 в условия сильного ЭМ излучения, в том числе на мачтах КВ и УКВ антенн при их точном позиционировании.
4. Устройство ввода для систем трехмерного моделирования и проектирования (CAD).
5. Тренажеры и симуляторы.
6. Игры.
Дополнительно:
Вместе с устройством IMU A1 дополнительмо могут поставлятся:
- Водонеприницаемый корпус размерами 64 x 44 x 14мм (IP67) с четырьмя крепежными отверстиями D=5мм, из алюминия или ABS пластика в зависимости от области применения. Корпуса выполняются путем фрезеровки на ЧПУ.
- Комплект полиэтиленовых разъемов (IP67).
- Преобразователь интерейсов RS-422 в USB.
- Программное обеспечение ZCompass для ОС Windows позволяющее визуализировать получаемое решение в 3D графике (OpenGL), провести калибровку и настройку начальных параметров.